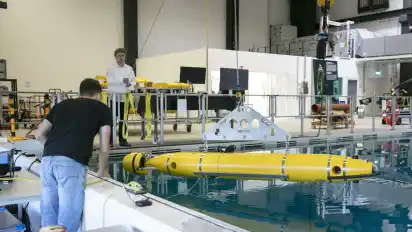

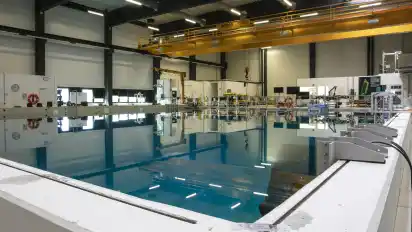


Im Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) an der Universität Bremen gibt es ein großes Salzwasserbecken. Das Becken fasst drei Millionen Liter Wasser und ist acht Meter tief. Hier werden Unterwasserroboter entwickelt und getestet. Auch der AUV Deep Leng – ein gelber, länglicher Apparat, der einem Torpedo ähnelt – darf hier seine Testrunden drehen. Betrachtet man den Roboter von vorne, sieht er wegen seiner großen Kamera fast so aus, wie ein einäugiger Minion – die kleinen, gelben Helfer des Schurken Gru aus dem Film „Ich – Einfach unverbesserlich“. Für den Tag der offenen Tür des DFKI testen Tom Creutz, wissenschaftlicher Mitarbeiter, und Marc Hildebrandt, Projektleiter, den Dockingvorgang des Roboters.
Der 120 Kilogramm schwere Unterwasserroboter, den Hildebrandt und Creutz mit einem Kran in das Wasserbecken heben, soll später unter der meterdicken Eisschicht des Jupitermonds Europa schwimmen. Und das ganz autonom, also, ohne von der Erde aus gesteuert zu werden.
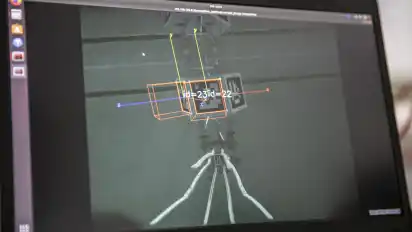
Während seiner Mission auf dem Jupitermond muss Deep Leng immer wieder eigenständig zu seiner Dockingstation finden, um seinen Akku aufzuladen, und sich auch selbstständig über den Meeresboden navigieren. Dafür braucht Deep Leng eine gut geschulte Künstliche Intelligenz (KI), die auch auf unvorhergesehene Situationen und Gegebenheiten vor Ort reagieren kann. Denn über den Jupitermond Europa weiß die Wissenschaft bis jetzt noch nicht sehr viel. Kalt ist es dort aber sicherlich. Wissenschaftler schätzen, dass die Wassertemperatur unter der Eisdecke -100 Grad Celsius beträgt. „Ich finde das Projekt auch deshalb so spannend, weil hier zwei wichtige Forschungsstandpunkte der Uni Bremen zusammenkommen – das Wasser und der Weltraum“, sagt Hildebrandt.
„In 40 Jahren könnte es so weit sein, dann soll unser Roboter Richtung Jupiter gebracht werden“, so Hildebrandt. Dabei soll er im Meer des Mondes Messungen vornehmen und auch gezielt nach Leben suchen. Deep Leng könnte aber nicht nur außerirdisches Leben in unserem Sonnensystem nachweisen: Er könnte auch Langzeitmessungen in der Arktis für die Klimaforschung machen. Auch für Kontrollgänge Unterwasser – beispielsweise in Offshore-Windparks – könnte der Roboter eingesetzt werden.